Структура института >> Научные подразделения >> Лаборатория № 9
ЛАБОРАТОРИЯ № 9
Нейробиология моторного контроля
Заведующий лабораторией – д.б.н. Левик Юрий Сергеевич
Тел.: (495) 650-28-95
Лаборатория № 9 была создана в 1986 году по решению Президиума АН СССР. Первоначально она носила название Лаборатории регуляции движений и других физиологических систем и возглавлялась д.м.н. В.С.Гурфинкелем (академик РАН с 1994 года). С 2000 года лабораторию возглавляет Ю.С. Левик.
В рамках исследования двигательной системы в 2005-2007 годах значительное внимание уделялось изучению вертикальной позы, в частности роли внутренней модели тела и внешнего окружения в поддержании равновесия. Дело в том, что старые исследования вертикальной позы были ограничены, в основном, симметричной стандартной позой. В то же время, в реальной ситуации мы обычно видим асимметричные позы, позы с дополнительной опорой и т.п.
Для подержания вертикальной позы ЦНС должна иметь некий репер – референтную или опорную вертикаль. Эту вертикаль она может взять из окружения – такова, например, зрительная вертикаль, или выработать самостоятельно, если в явном виде она не содержится в афферентной информации.
Известно, что поддержание вертикальной позы у человека осуществляется с использованием разномодальной афферентной информации: зрительной, соматосенсорной, вестибулярной. ЦНС способна использовать дополнительные источники информации о положении тела; это приводит к увеличению устойчивости и уменьшению колебаний ОЦД. Напротив, если источник афферентации перестает давать надежную информацию о положении тела, то система регуляции позы может игнорировать сигналы от такого источника, и его наличие перестает влиять на позные колебания. Необходимо отметить, что возможность использования дополнительных источников информации или изменение приоритетов в выборе источников афферентации требует участия системы внутреннего представления – модели учитывающей биомеханику тела и свойства ближайшего окружения.
Примером использования дополнительной афферентации является стабилизирующее влияние тактильного контакта. Мы сравнивали изменение позных колебаний человека при прикосновении к внешнему объекту во время стояния на неподвижной и медленно движущейся стабилографической платформе. Механическое взаимодействие с внешним объектом было незначительным (скользящий контакт внешней поверхностью указательного пальца). На неподвижной платформе после прикосновения колебания уменьшились и составили 42±14 % от величины колебаний без прикосновения. Если платформа двигалась, то контакт с внешним объектом приводил к тому, что позные колебания составляли 58±15% от величины колебаний без контакта, т.е. уменьшались в меньшей степени, чем на неподвижной платформе. Средняя величина позных колебаний при стоянии на движущейся неустойчивой опоре составляла 17±7 мм и уменьшалась до 10±3 мм при контакте с внешним объектом. Отметим, что в отсутствии контакта быстрые колебания на неустойчивой опоре были одинаковыми на движущейся и неподвижной опоре. Таким образом, движение платформы приводило к тому, что стабилизирующее влияние контакта с внешним объектом уменьшалось по сравнению с этим же влиянием на неподвижной платформе. Вероятно, при стоянии на неподвижной платформе точка контакта с внешним объектом является репером для определения движения верхней части корпуса. При перемещении платформы движение точки прикосновения к внешнему объекту может интерпретироваться и как движение тела относительно опоры, и как движение самой опоры. Таким образом, контакт перестает давать однозначную информацию о положении тела и не может быть точкой отсчета, что приводит к меньшей стабилизации позных колебаний.
Полученные данные хорошо согласуются с результатами наших исследований, согласно которым на неустойчивой опоре типа пресс-папье отклонение тела от вертикали при вибрации мышц голени уменьшается, что, вероятно, связано со снижением роли проприоцептивной афферентации от голеностопного сустава, перестающей давать однозначную информацию о положении тела. Мы также сравнивали тонический вибрационный рефлекс (ТВР) на неподвижной и движущейся платформе при наличии и отсутствии контакта и показали, что на неподвижной опоре контакт значительно уменьшает реакцию на вибрацию. В то же время на движущейся платформе отклонение при ТВР при контакте и без контакта отличается меньше.
Можно предположить, что в зависимости от устойчивости опоры и условий контакта меняется относительный вклад разных уровней управления движениями в поддержание позы. Об этом говорит и то, что как абсолютные, так и относительные (нормированные на фоновую ЭМГ) ответы в мышцах ног на транскраниальную магнитную стимуляцию значимо увеличиваются при стоянии на неустойчивой опоре.
Только участием системы внутреннего представления можно объяснить результаты следующего эксперимента: у стоящего с закрытыми глазами человека исследовали поддержание равновесия во время удержания им небольшого груза при стоянии на неустойчивой платформе в виде пресс-папье. Грузы разной массы удерживались между указательным и большим пальцами руки, согнутой в локтевом суставе. Скорость изменения длины сагиттальной стабилограммы и среднеквадратичное отклонение центра давления от положения равновесия уменьшались, когда испытуемый удерживал груз, стоя на подвижной опоре. Наибольшее уменьшение скорости изменения длины стабилограммы наблюдалось при стоянии с грузом 1000 г и составляло 44.5±6.8 мм/с, в то время как при стоянии без груза оно составляло 52.6±9.2 мм/с (p<0.05, парный Т-тест). В тоже время, когда данные грузы крепились на механический кронштейн, прикрепленный к корпусу и имитирующий согнутую в локте руку, – достоверного изменения параметров стабилограммы не происходило. По-видимому, уменьшение позных колебаний связано с тем, что система поддержания равновесия может использовать для управления вертикальной позой такой необычный афферентный вход, как модуляцию афферентных сигналов, вызванных инерционным взаимодействием предмета и пальцев руки.
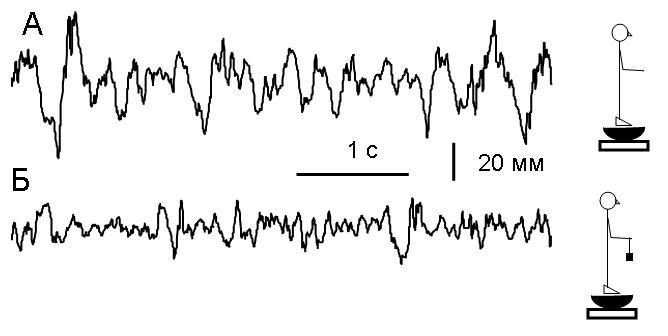
Рис. 1. Изменение сагиттальной стабилограммы при стоянии на подвижной опоре с грузом (А) и без груза (Б).
Новизна и научная значимость этих работ определяется тем, что в большинстве исследований вертикальной позы человека исследуется спокойное стояние в симметричной позе. В то же время, в повседневной жизни поза редко бывает симметричной, и система управления умеет обеспечивать устойчивость на разных типах опорных поверхностей, при разных типах возмущений и в условиях дополнительного контакта. Моделирование таких условий в эксперименте, по нашему мнению, может быть мощным инструментом исследования постурального контроля, в частности, высших уровней системы регуляции, тесно связанных со схемой тела или системой внутреннего представления.
Практическое значение этих работ связано с тем, что нарушения позы и движений характерны для многих неврологических заболеваний, заболеваний мышц и суставов, последствий травм спинного и головного мозга. Поэтому исследования механизмов управления движениями у человека важны с точки зрения диагностики этих заболеваний и разработки методов реабилитации и объективного контроля за ее ходом. В течение длительного времени проблема восстановления двигательных функций пациентов, перенесших мозговой инсульт или черепно-мозговую травму сводилась к применению различных методов лечебной физкультуры (ЛФК), физиотерапии, медикаментозной терапии. С появлением новых методов двигательной реабилитации, таких как функциональная электростимуляция (ФЭС) врачи получили новые способы лечения. При повреждениях центральной нервной системы необходимо использовать возможности для ранней активации процессов реорганизации мозговых связей. Кроме того, при ходьбе пациента в условиях значительного дефицита мышечных сил часто возникает и жестко закрепляется новый, несвойственный здоровому человеку стереотип движений, который трудно поддается коррекции. Необходимо, чтобы прямостоянию и прямохождению предшествовал курс функциональной электростимуляции, направленный на укрепление мышц и выработку правильных паттернов ходьбы в положении лежа. Эти занятия должны начинаться в положении лежа и сочетаться с постепенным переводом пациента в вертикальное положение.
Аппаратно-программный лечебно-диагностический комплекс для восстановления ходьбы “Вертикаль”
СОТРУДНИКИ ЛАБОРАТОРИИ:
| 1. Блинов Егор Олегович |
Младший научный сотрудник |
| 2. Долинская Ирина Юрьевна |
И.о. младшего научного сотрудника |
| 3. Казенников Олег Васильевич |
Ведущий научный сотрудник, д.б.н. |
| 4. Киреева Татьяна Борисовна |
Научный сотрудник |
| 5.Клеева Дария Федоровна |
Научный сотрудник |
| 6.Лебедев Михаил Альбертович |
Ведущий научный сотрудник, к.н. |
| 7. Левик Юрий Сергеевич |
Заведующий лабораторией, д.б.н., с.н.с. |
| 8. Липшиц Марк Иосифович |
Ведущий научный сотрудник, д.б.н. |
| 9.Макарова Анна Владимировна |
Младший научный сотрудник |
| 10.Селионов Виктор Александрович |
Ведущий научный сотрудник, к.н. |
| 11.Согоян Гурген Арамович |
Научный сотрудник |
| 12. Солопова Ирина Александровна |
И.о. ведущего научного сотрудника, к.б.н. |
| 13. Шлыков Владимир Юрьевич |
Старший научный сотрудник, к.б.н. |
| 







