









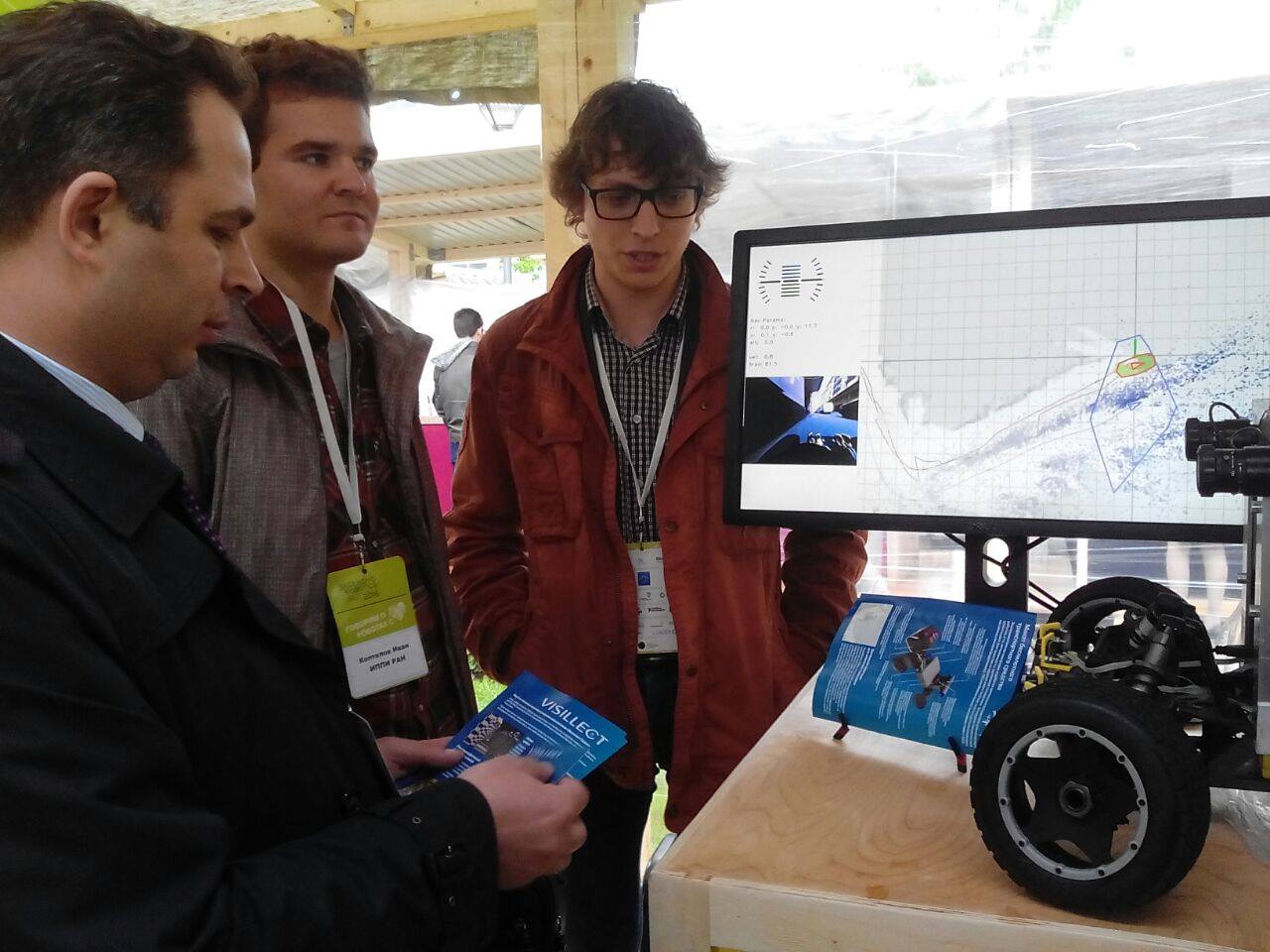
Команда Лаборатории зрительных систем №11 и малого инновационного предприятия ИППИ РАН ООО «Визиллект Сервис» приняла участие в Четвёртой международной конференции Skolkovo Robotics 2016, где продемонстрировала макет беспилотного наземного транспортного средства и работу системы навигации на основе зрительных технологий.
Макет представляет собой экспериментальную платформу, используемую учеными для работы над зрительными алгоритмами ориентации в пространстве. На выставке было продемонстрировано устойчивое определение собственного положения робота на заранее известной территории, в том числе, в условиях временной потери сигнала с сенсоров.
"Одно из основных направлений, где может быть применима наша технология - это беспилотный транспорт на закрытых территориях, например, на территории некого предприятия". - представил разработку младший научный сотрудник Лаборатории №11 ИППИ РАН Антон Григорьев - "В перспективе это усовершенствованная экономичная система, не требующая дополнительных изменений территории, основанная исключительно на зрении".
Также во время выставки была продемонстрирована в реальном времени работа следующих алгоритмов:
- визуальный гироскоп: при физическом отключении инерциальных датчиков отображаемая на экране 3D-ориентация продолжает определяться согласованно с перемещением робота, в т.ч. при заслонении одной из камер;
- картирование: робот проворачивается по кругу, при этом на экране отображается карта препятствий.
Конференция Skolovo Robotics 2016 организована Робототехническим центром «Сколково» и Сколковским институтом науки и технологий (Сколтех). Генеральный партнер мероприятия – Московский технологический институт. 20 мая на открытом воздухе в Сколково проходили пленарные заседания, выставка робототехнических проектов, инвестиционные и менторские сессии, мастер-классы и шоу-программа.
| 21.05.2016 | |